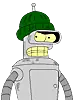
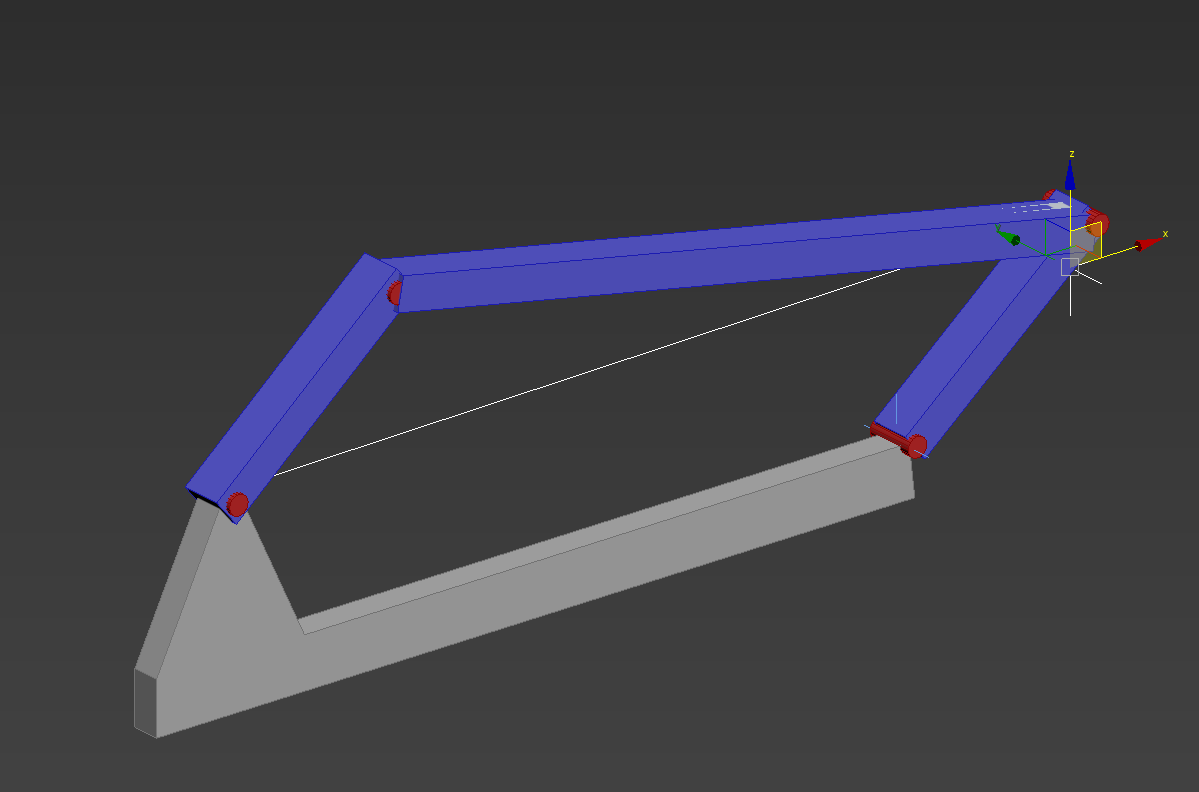
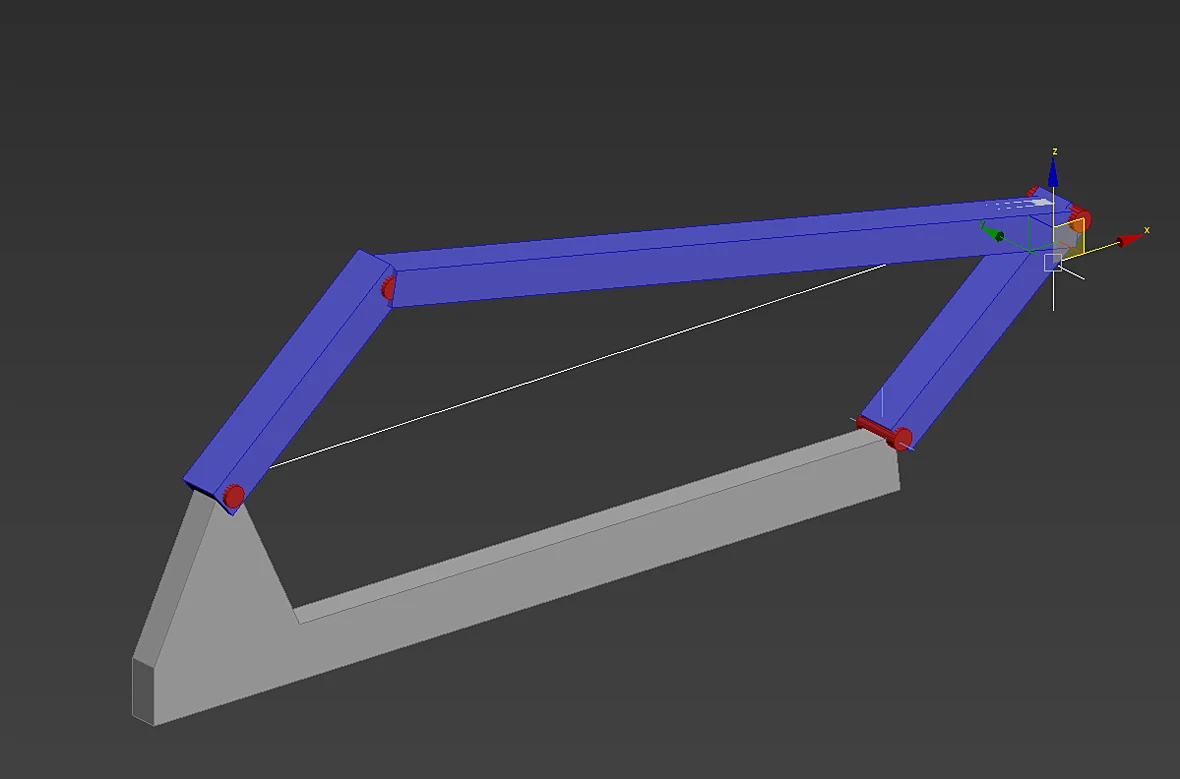
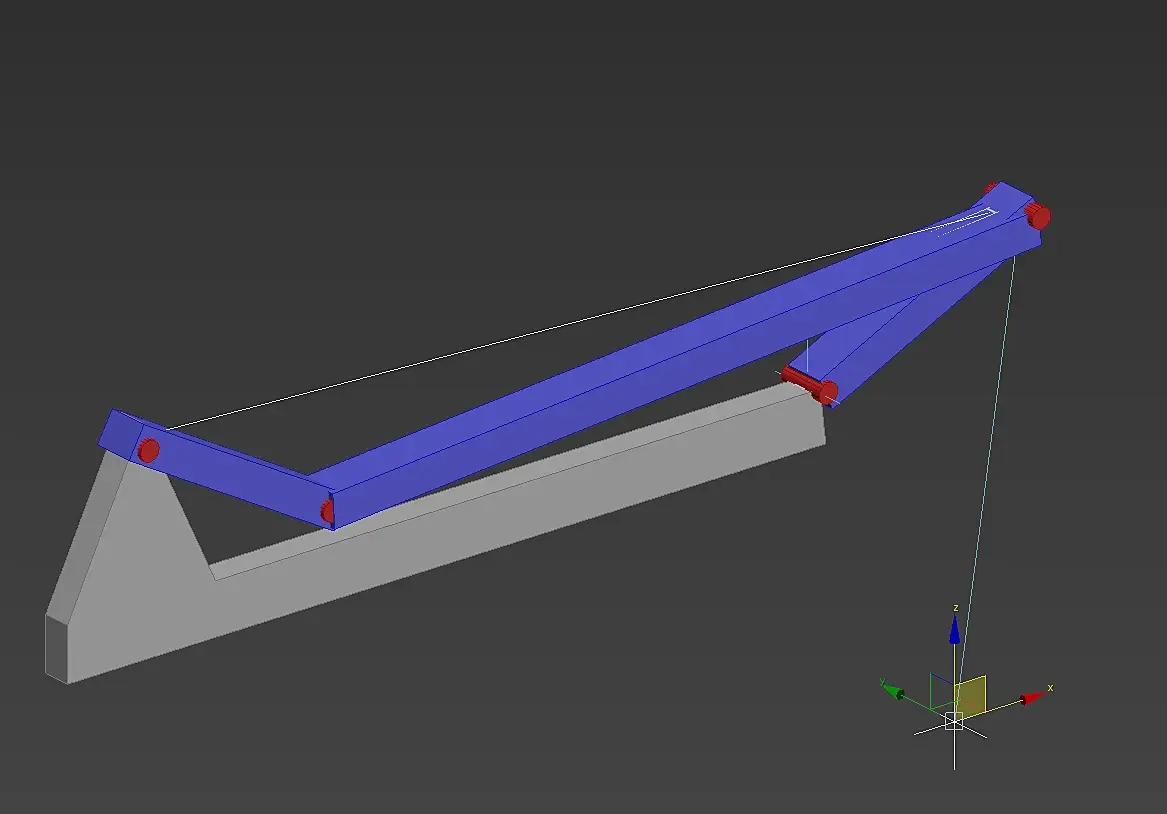
Вникнув я понял что костями проще. Вот итог:
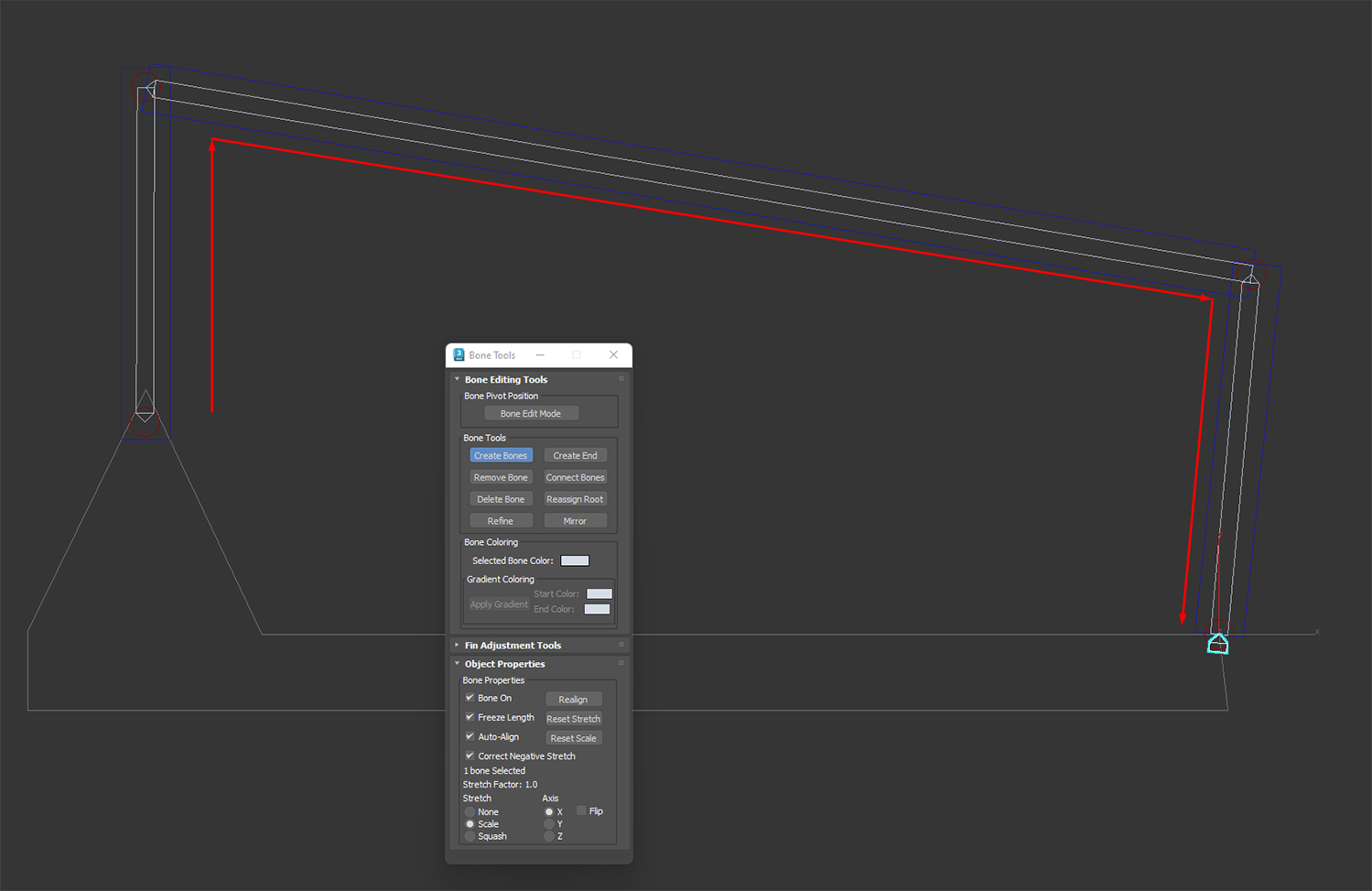
Вот конструкт, который соответствует твоей ситуации. Безусловно, геометрия частей может быть любая. Опорные точки геометрии, как и она сама, должна соответствовать тем задачам - которые ты ставишь анимацией. В моем примере я показал коробочками, и не выравнивал пивоты в ноль.
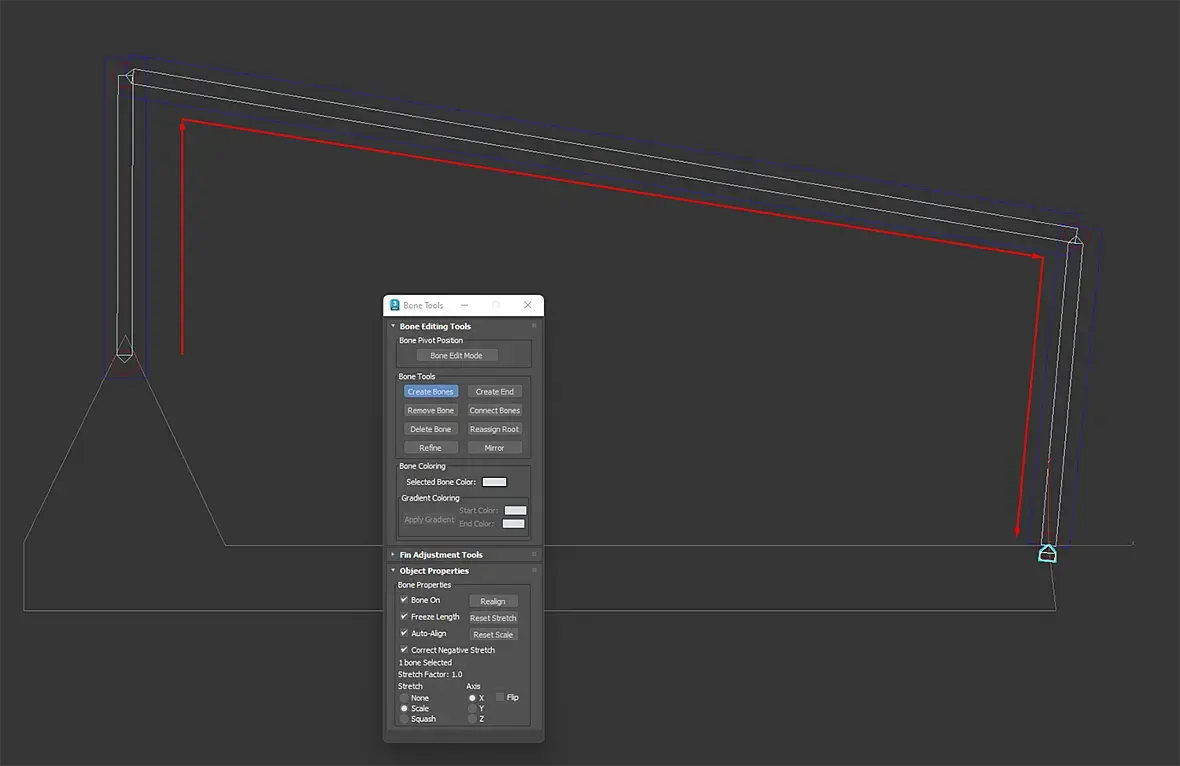
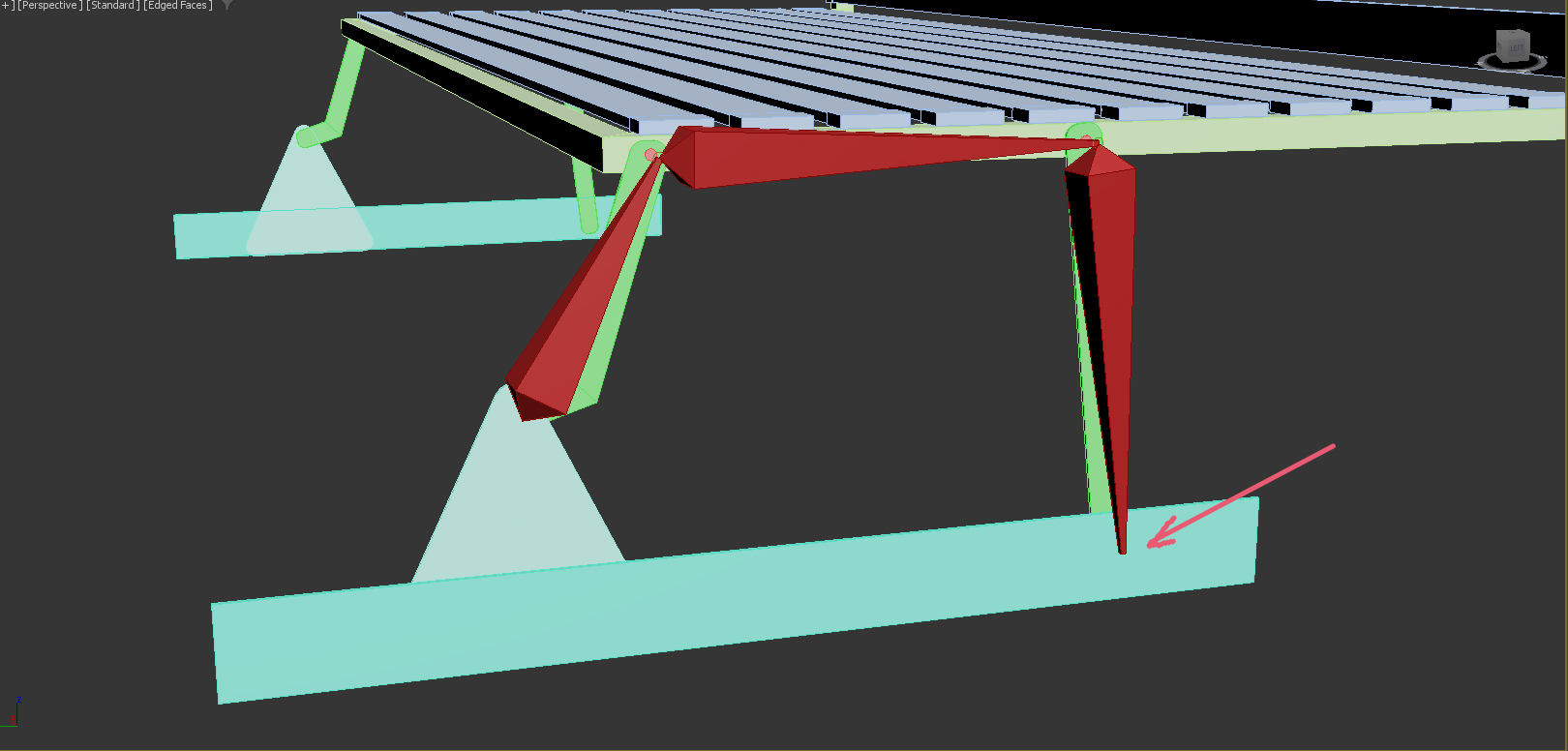
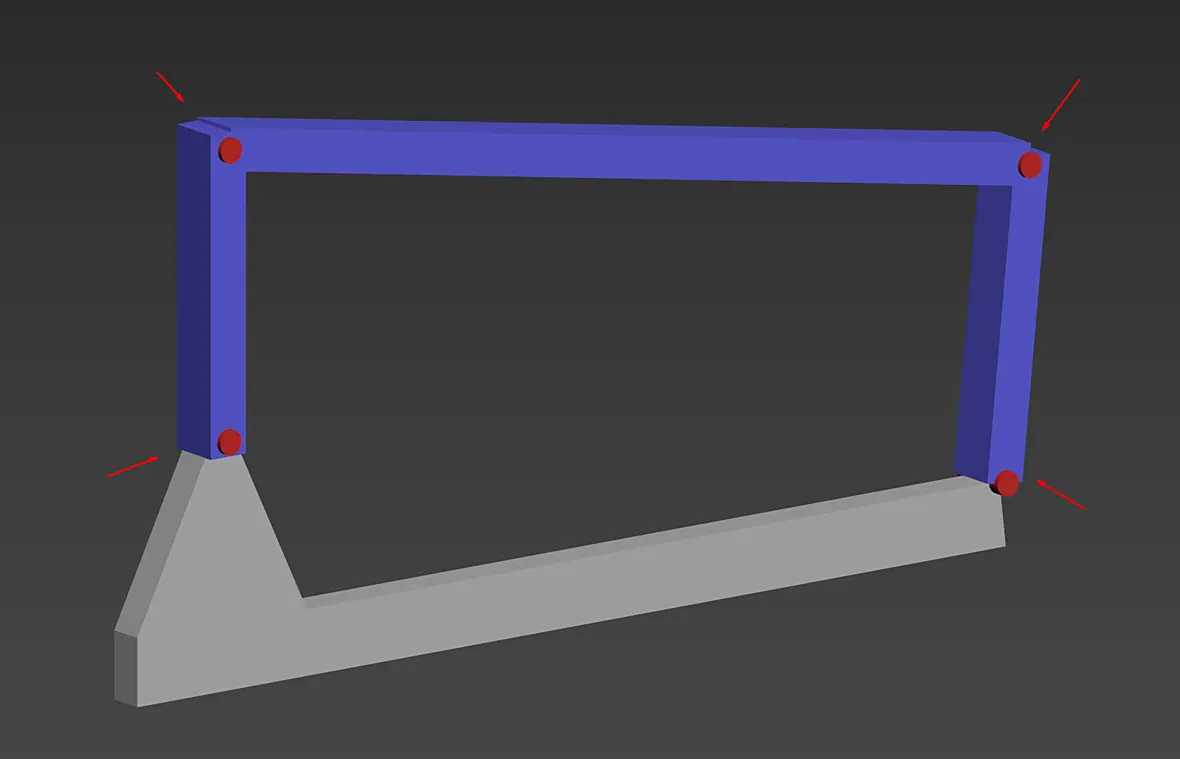
Сделай систему костей через стандартное окно работы с костями, внутри своей геометрии. в целом можешь и где то рядом, но это потребует работы с отступами опорных точек костей. проще сделать пивоты костей - пивотами шарниров сустава. Направление у меня слева направо, но это повлияет только на приоритетную "коленку"
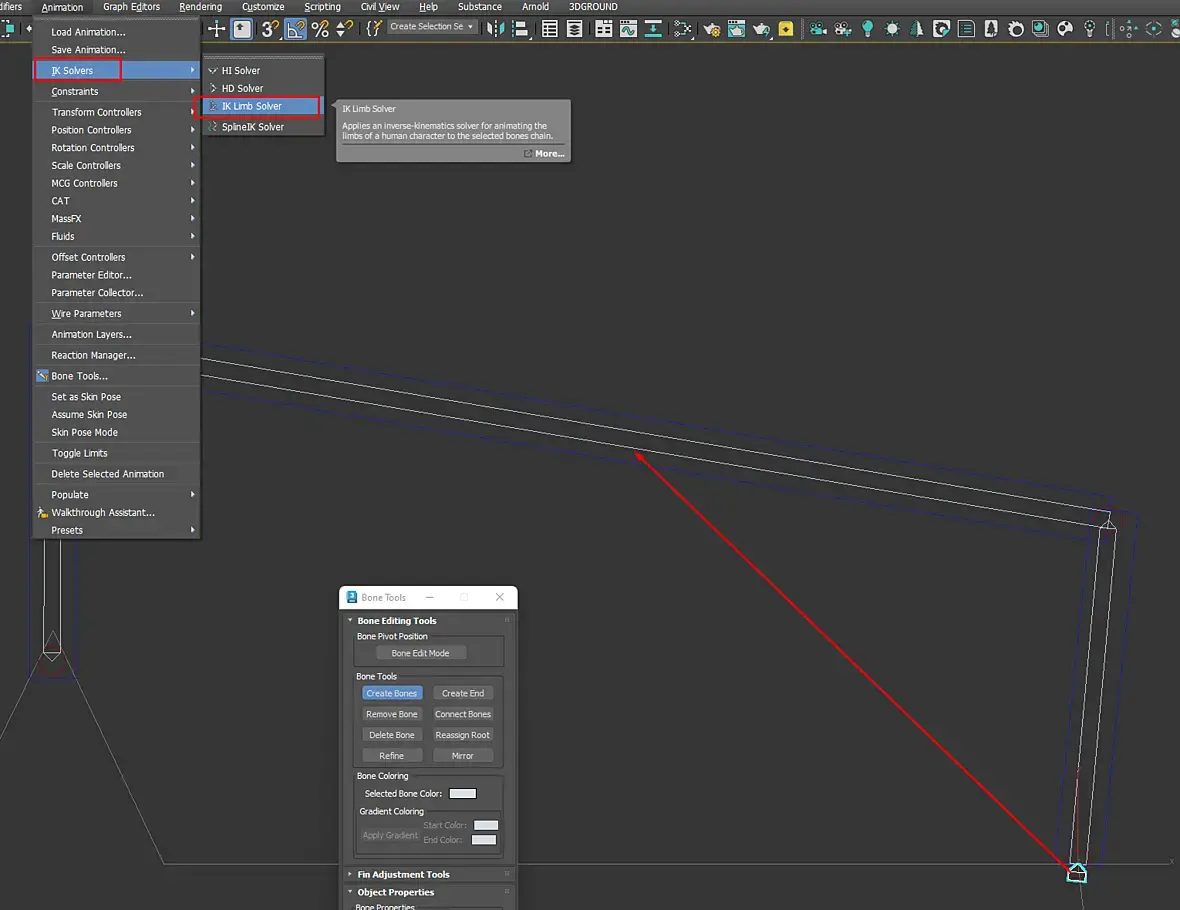
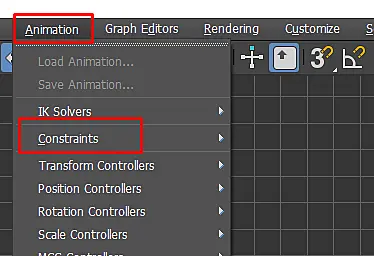
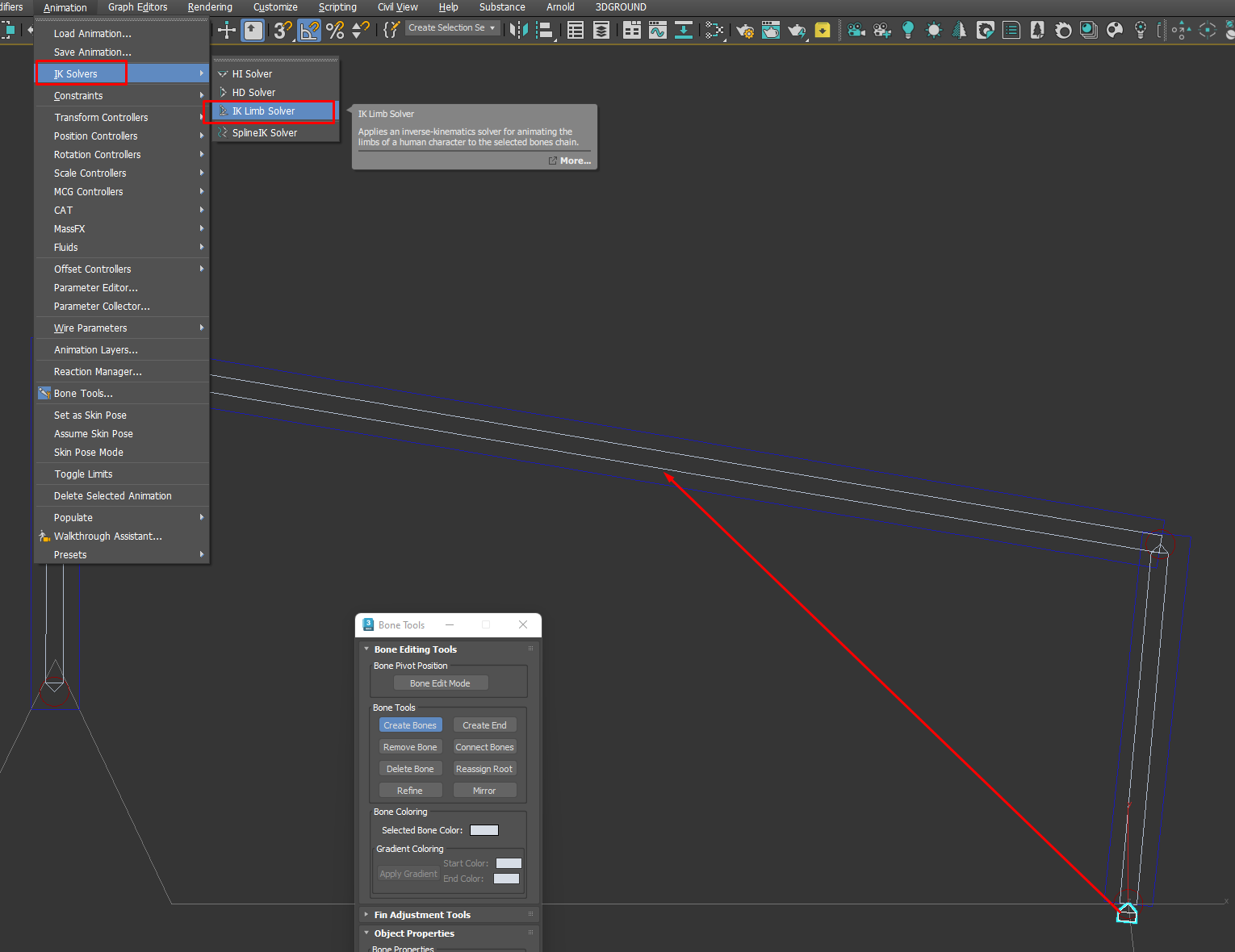
Затем, сделай limb solver от крайней кости, через одну.
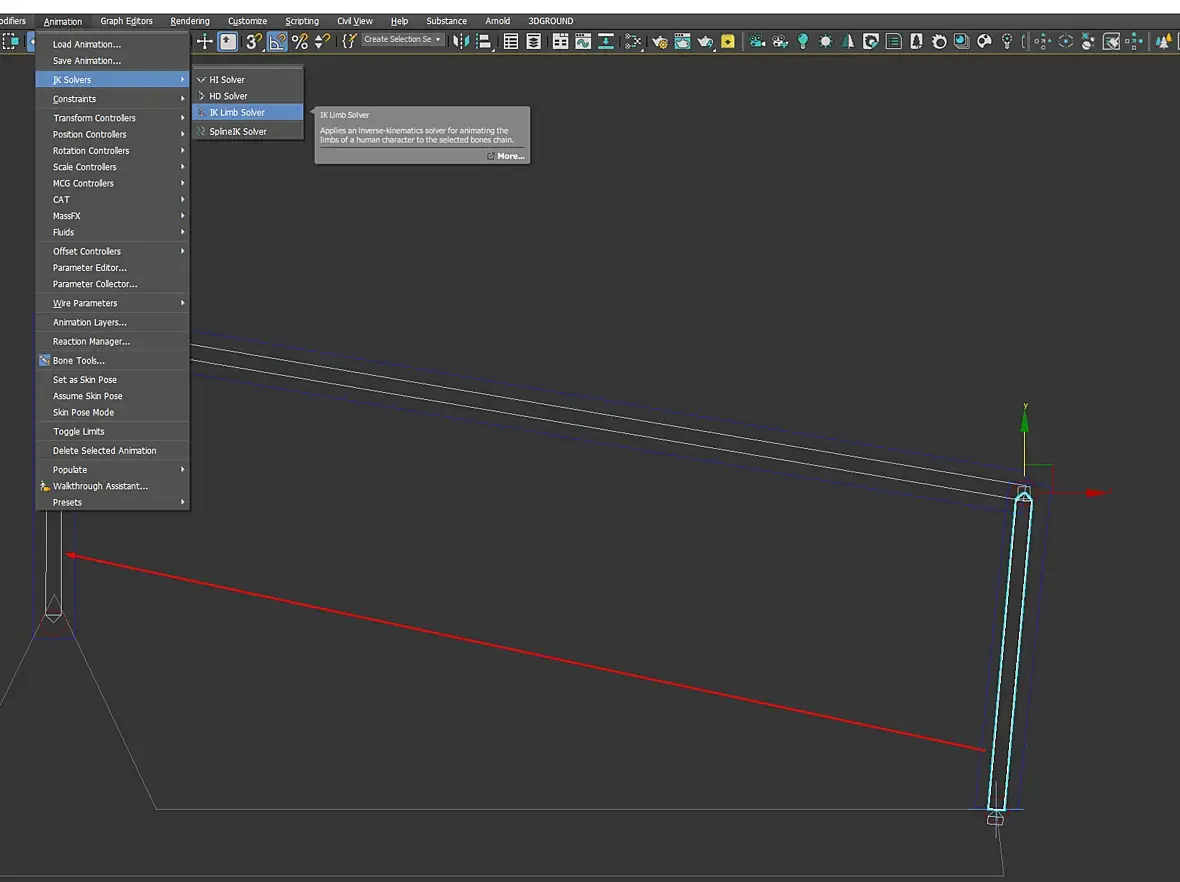
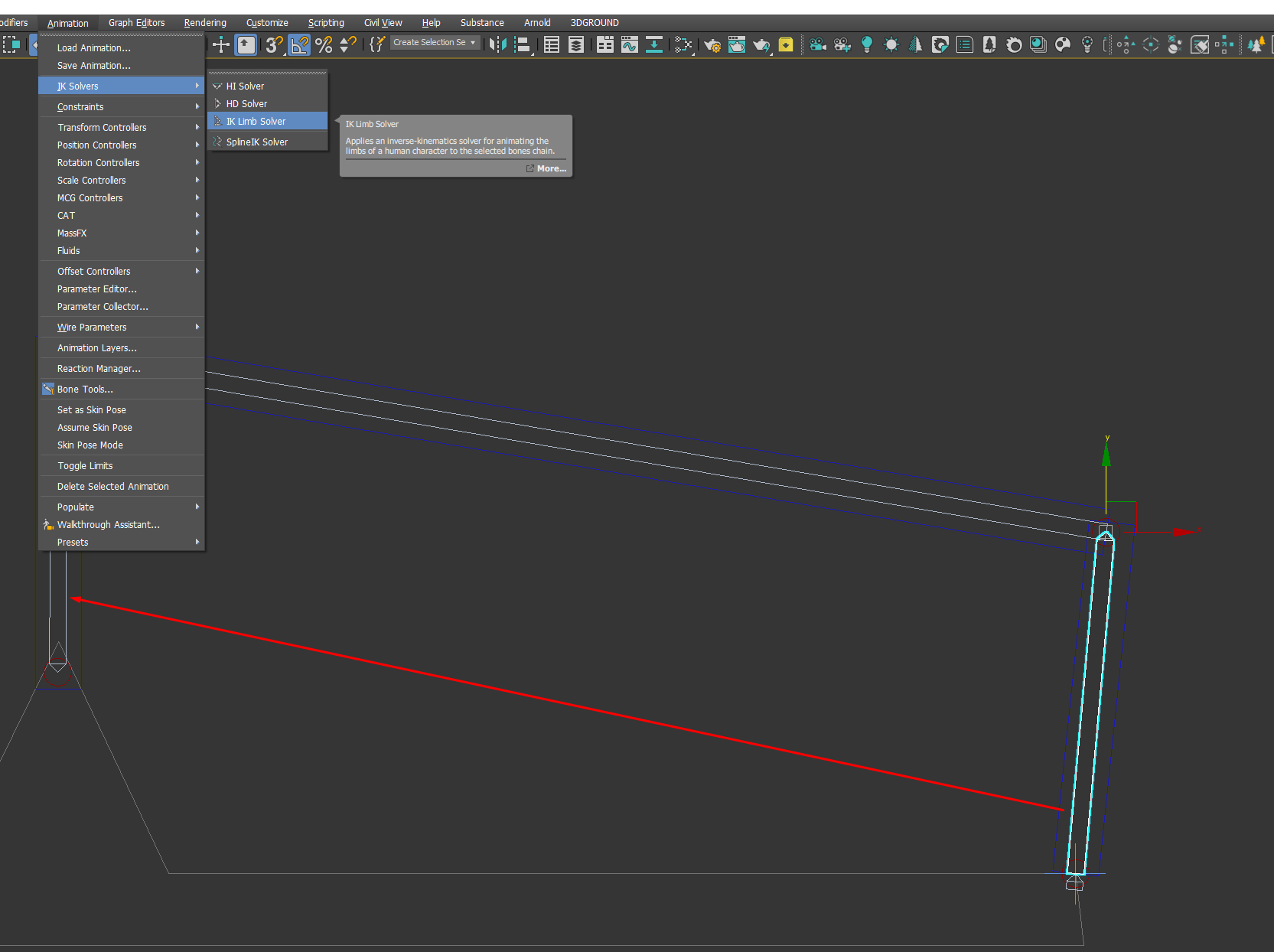
И потом от следующей, через одну.
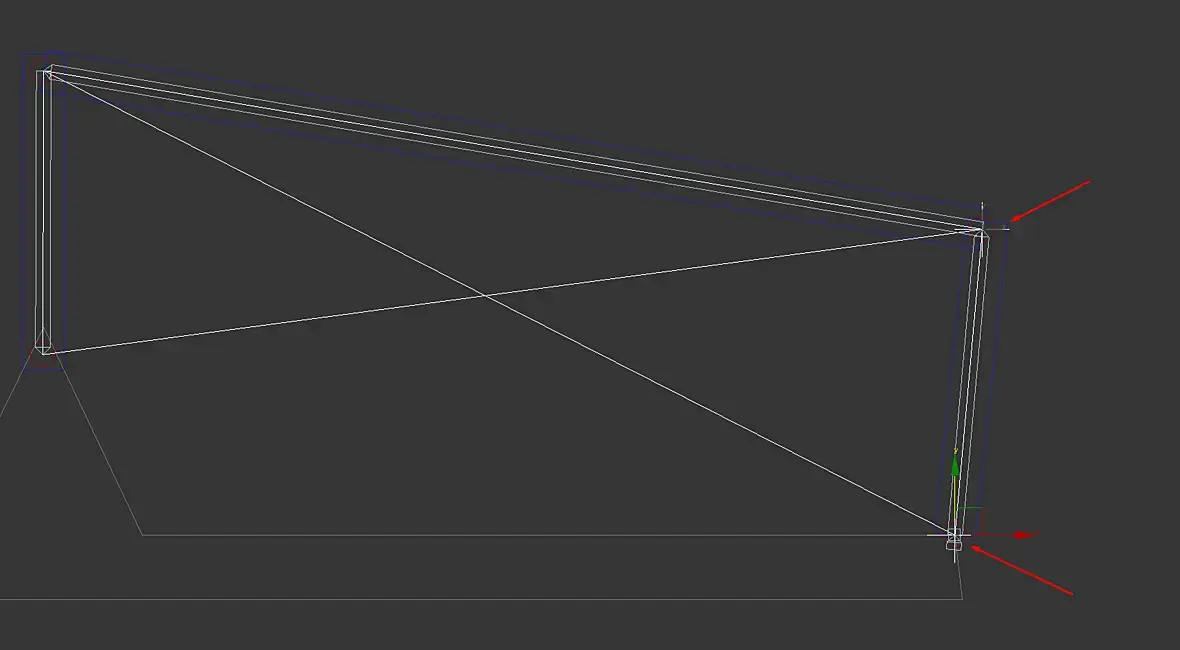
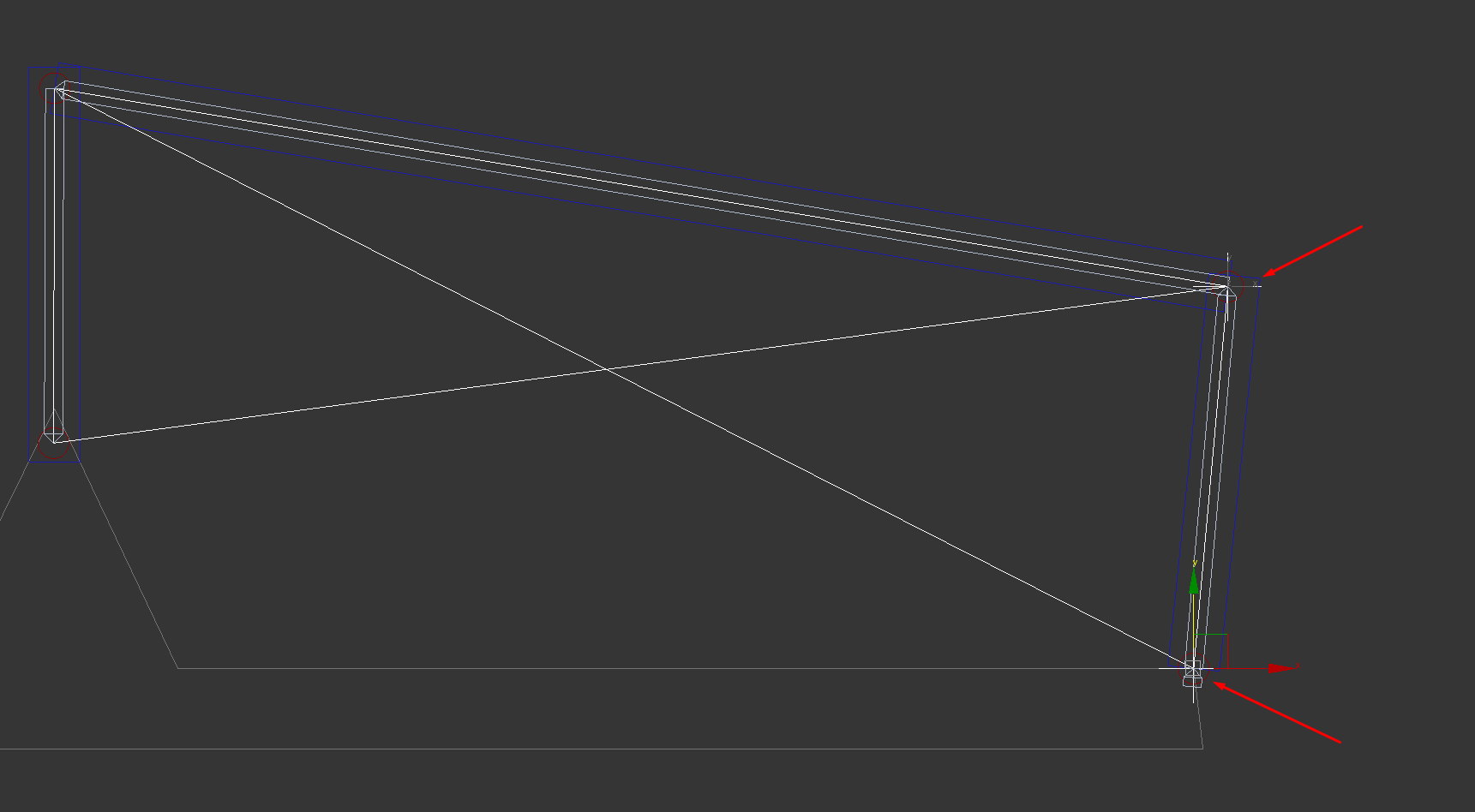
Итого, если выделить оба эффектора, ты увидишь перекрестные цепочки инверсных кинематик.
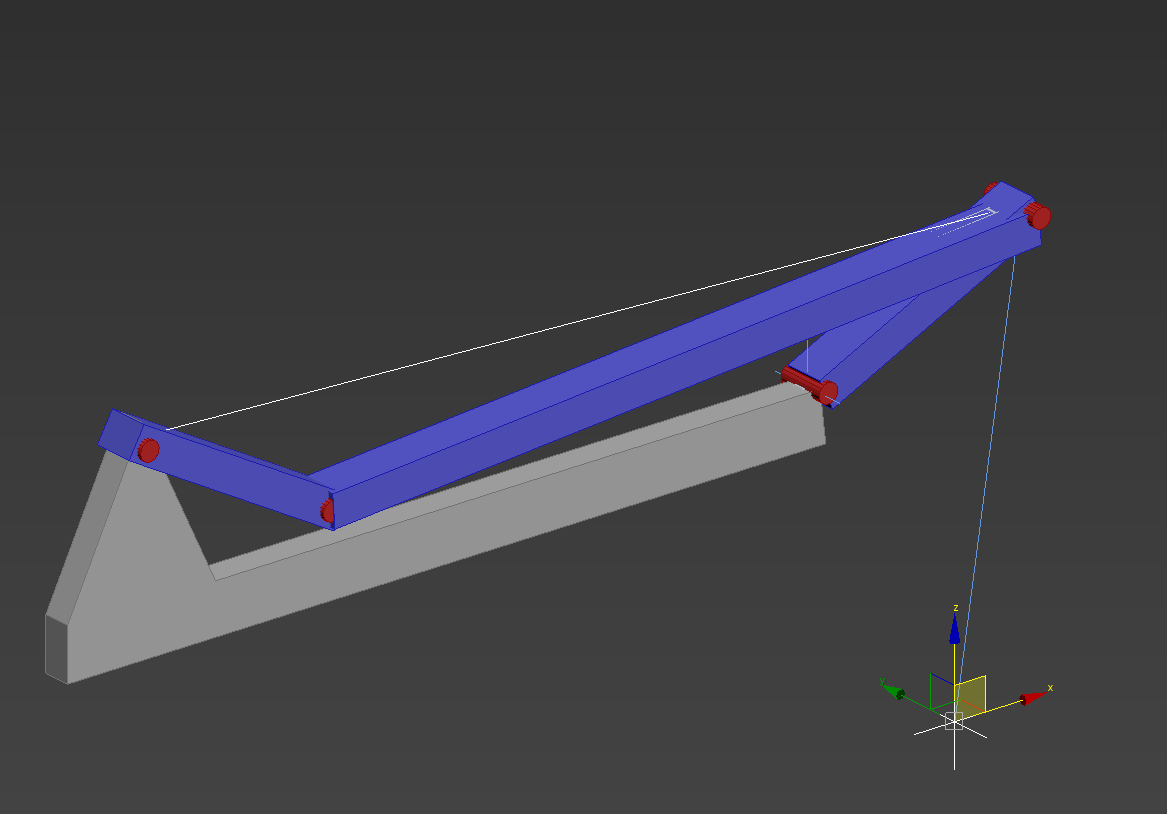
Далее. Перемещая эффектор коленки, ты сможешь получить любое положение всей цепочки костей, и, привязанной к ней геометрии. Геометрию привязывай через линк, конфликтов иерархии не будет.
Важно - эта схема очень проста, но второй коленкой ты управляешь опосредованно. Ты можешь получить любое возможное сочетание положений двух суставов. но второй как бы зависим от первого. По идее - тебе должно хватить и этого, но если нет, напиши, я сделаю более сложный, но управляемый полностью конструкт.
Сам эффектор, ты можешь линковать к сплайнам, описывающим движение механизма, или использовать свои констранты, например на положение, или вращении иных элементов системы.
Доброго вечера.